2016年度なわてんグランプリ|後援会賞「靭帯特性に基づく痛み評価手法の提案とヒト型無線レスキューダミーによる検証」奥本昂大さん #ロボット #卒業制作 #なわてん
2016年度なわてんグランプリの後援会賞には、奥本昂大さん(情報学科・視覚メディア研究室)による、「靭帯特性に基づく痛み評価手法の提案とヒト型無線レスキューダミーによる検証」が選ばれました!おめでとうございます!

奥本さん:この研究は、去年からずっとやっているのですが、中々納得できず今年も続けてきたことで、ある程度のレベルになったのかなと思います。研究はまだ発展の余地があるので、後輩たちがこの研究を引き継いでくれるように指導していこうと思います。
【特別審査委員 後援会会長 河本智子氏のコメント】
まず、出展作品全般において、年々テーマや着目点が面白く、興味をひくものとなっていると感じました。
作品を完成させるまでの、いろんな悩みや挌闘、先生を始め、関わってくれた回りの人たち、そして評価、これらすべてを受け入れて次に進むのがあななたちです。なわてんが終わりではないと思います。これからも頑張ってください。
さて後援会賞の作品ですが、協議の結果、実用化できる可能性があるという点を評価し、奥本さんの研究に決まりました。痛みを数値化することは難しく、現在でも一般的な評価方法はないそうです。奥本さんの研究では、間接をねじった時に生じる痛みに注目して、内部にある腱の伸び、特性に基づいて痛みを数値化する新しい手法を提案しています。また、904という市販の人形モデルを改造、無線化し、レスキューロボットで救援する際に与えてしまう痛みを考察したということで、この研究が今後も進むことを期待しています。
【作品解説】
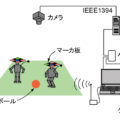
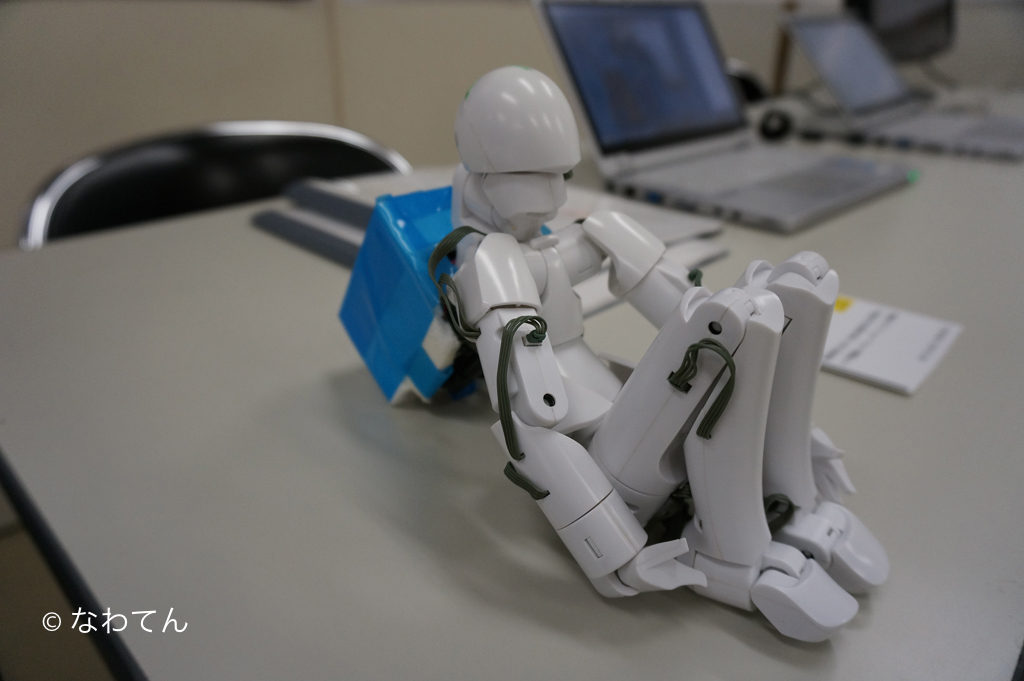
現在、レスキューロボットコンテストで用いられているダミー人形(ダミヤン)は胴体の圧迫や首の屈曲によりダメージを受けるが、このダメージの算出はヒトの特性の基づくものではなく現実的とは言い難い。そこで本研究ではヒトの靭帯特性に基づく関節の曲げに対する痛みの評価手法を提案する。本手法では、まず各関節の通常の可動範囲においては痛みは無いと定義した。次に、1974年に発表されたヒトの靭帯の引張り試験によるデータを元に、引張り始めから断裂するまでの範囲を6次関数で近似する関数を作成した。これらを組み合わせることで、関節を強く曲げた際に発生する痛みを0〜100%で算出することが可能となった。本手法を用いることより実際に人が感じる痛みに近い感覚を数値として得られること期待できる。これを検証するために、全身の関節角度を取得することができる人型入力装置であるセルシス社製QUMARIONを用いた。QUMARIONは元来、有線でデータ送信する装置である。
昨年度の卒業研究ではQUMARIONを無線化してはいたが、装置が大型でダミヤンとして用いたり検証実験には使いにくいという問題があった。そこで本研究ではこの小型化を試みた。具体的には、メインコンピュータをRaspberryPi model BからRasberry Pi Zeroに変更し、大幅な小型化・軽量化を実現した。またUSBハブを改造してRaspberry Pi Zeroの電源を通信用MicroUSBポートより給電し、無駄な配線を削減した。さらに電源は9V電池をDC-DCコンバータを使用して5Vに降圧して小型化し、本体との接続用USBケーブルもUSBハブへの直付けにより小型化した。この無線化小型QUMARIONを用いてバックホータイプの無線操縦型レスキューロボットによる模擬救助実験を行い、QUMARIONに加わる痛みを検証した。その結果、現実に近いと感じられる痛みを表示し、提案手法が妥当であることが分かった。