2016年度なわてんグランプリ|学術研究賞「RoboCup SSL Humanoidにおける歩行動作の選択とキックへの応用」平井雅之さん #ロボット #RoboCup #卒業制作 #なわてん
2016年度なわてんグランプリの学術研究賞には、平井雅之さん(情報学科・ロボティクス研究室)による、「RoboCup SSL Humanoidにおける歩行動作の選択とキックへの応用」が選ばれました!おめでとうございます!
【審査委員代表 久松潤之先生のコメント】
この研究は、提案・実装・評価、そして応用まで考えられていて完成度がとても高かったです。満場一致で決まりました。
平井さん:プログラムを作るまでは良かったのですが、実装してみたらうまく動かず、自分の望む動きになるまで何度も修正を繰り返したことです。時間がかかって大変でした。ありがとうございました。
【作品解説】
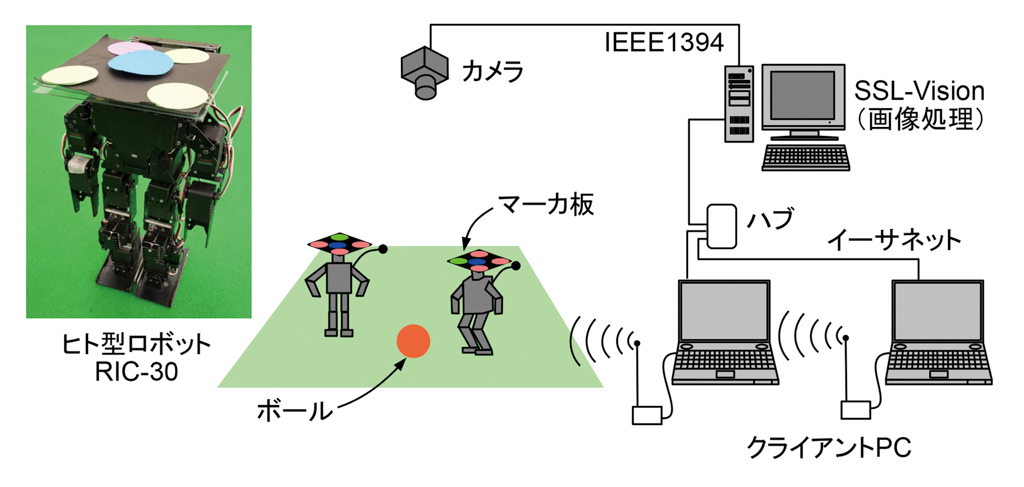
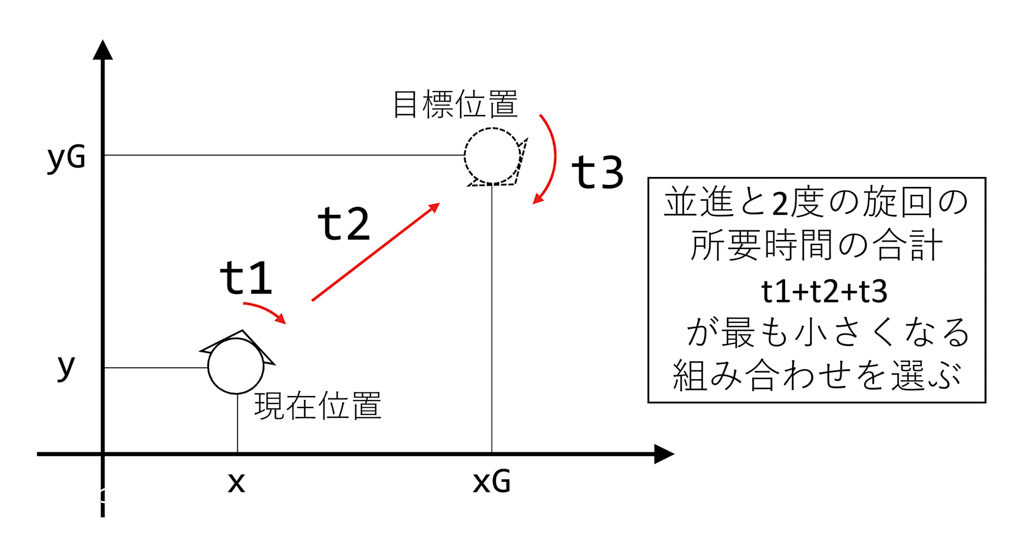
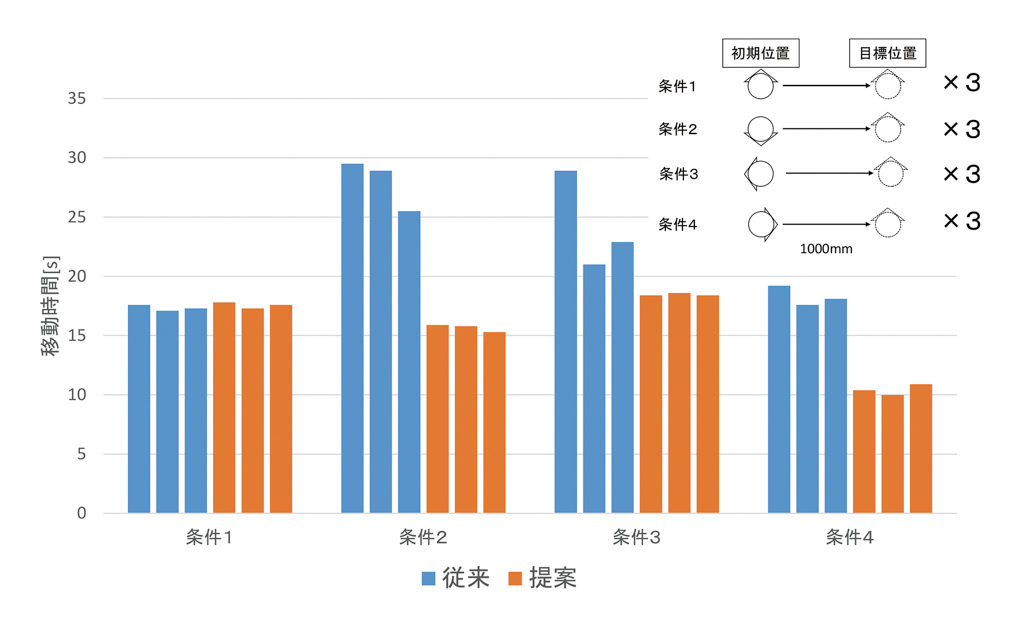
本研究では、ロボットサッカー競技RoboCupのSSL Humanoidシステムの行動決定プログラムにおいて、ロボットの歩行動作である前進、左進、右進、後進の選択に取り組んだ。歩行動作には4種類しかないので、目標位置における方向も考慮した歩行動作の選択が重要である。ロボットの移動は現在位置での旋回、目標位置への並進、目標位置での旋回の3つの動作で完了する。私が所属する大阪電気通信大学ODENSチームが従来使用していたプログラムでは目標へ移動する際に直進の歩行速度は種類によらず一定とみなし旋回角度の絶対値の和が最も小さくなる歩行動作を選んでいた。しかし、実際には歩行動作によって速度は異なるので状況によっては適切ではない歩行動作が選ばれていた。そこで、本研究では一連の移動に要する時間が最も短くなる歩行動作を選ぶことにした。前述の通り移動は3つの動作で完了する。各動作に要する時間をt1、t2、t3として、合計が最も短い歩行を選ぶ。検証に用いたロボットでは、他の歩行に比べて前進の速度が大きいので、目標までの距離が遠い場合は、適切に前進を選択するようになった。この方法を拡張し、中継点を経由する場合にも使えるようにした。中継点を経由する場合では現在位置での旋回、中継点への並進、中継点での旋回、目標位置への並進、目標位置での旋回の5つの動作で移動を完了する。4種類の並進を2回行うので、全部で16パターンの歩行動作が考えられる。これらの移動に要する時間が最も短くなる歩行動作を選ぶようにした。さらに、ボールに近づいて指定の位置へキックする行動において、ボールに対して回り込まなければならない場合の歩行に中継点を経由する場合の歩行動作の選択を応用し、改善した。