【2015年度 なわてんグランプリ/学術研究賞】「3次元点群の提示とマスタスレーブ方式を用いたロボットアームの遠隔操作」三谷峻生さん
芸術賞に続いて、学術研究賞の発表です。
この賞は、これまでにない斬新な着眼点の研究や、
現時点ではまだ完成していなくても
将来広く役立つと期待できる研究に贈られます。
最終選考に残った学術研究賞ノミネート作品は、
三谷峻生さんによる「3次元点群の提示とマスタスレーブ方式を用いたロボットアームの遠隔操作」
石井岳さんによる「NPCのAI自動構成のための機械学習に関する研究」
藤吉栞里さんによる「アニメーションからみる女性の変身願望」の3つです。
この中から2015年度 なわてんグランプリで【学術研究賞】に輝いたのは、
メディアコンピュータシステム学科の三谷峻生さんによる、
「3次元点群の提示とマスタスレーブ方式を用いた
ロボットアームの遠隔操作」です。
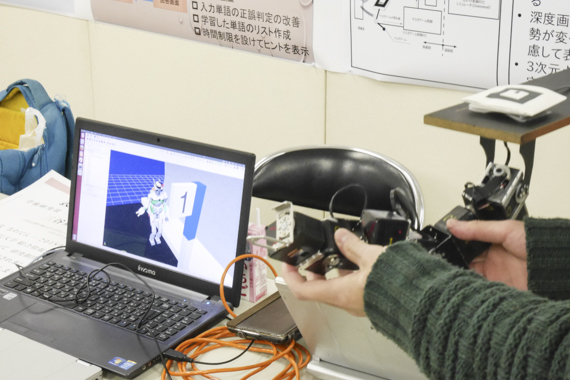
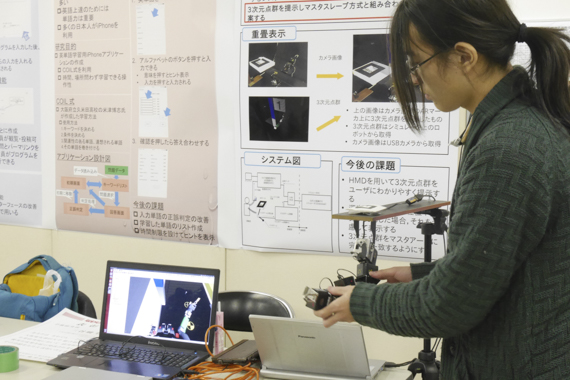
写真のように、手元のロボットアームを動かすと、
仮想空間のロボットが同じ動きをします。
また、アームの先端にカメラがついていて、
アームを動かす事で、撮影する方向や位置を操作できます。
三谷さん、おめでとうございます!

・学術研究賞審査委員 北嶋先生のコメント
この研究では、遠隔ロボットと同形のロボットを手元で操作する事で遠隔ロボットを操作できる方法を提案し、実際に操作用のアームを制作して、その実験と評価ができています。
この研究により、人間が細かな作業を助ける事ができるため、例えば危険な環境での複雑な操作やロボットアームを使った手術などにも応用できると期待されます。

・三谷さんのコメント
こんな立派な賞をいただけるとは思っていなかったので、
言葉が出てこないです。ありがとうございました!